
Assistenza tecnica di primo livello per Universal Robots
Forniamo assistenza tecnica di primo livello per i marchi distribuiti e non solo.
Puoi consultare le domande frequenti e se non trovi risposta puoi compilare la form per inviarci la tua richiesta di supporto.
F.A.Q. / Domande frequenti per Universal Robots
Per reperire la matricola del robot ci sono diverse possibilità, clicca sull’immagine per ingrandirla.
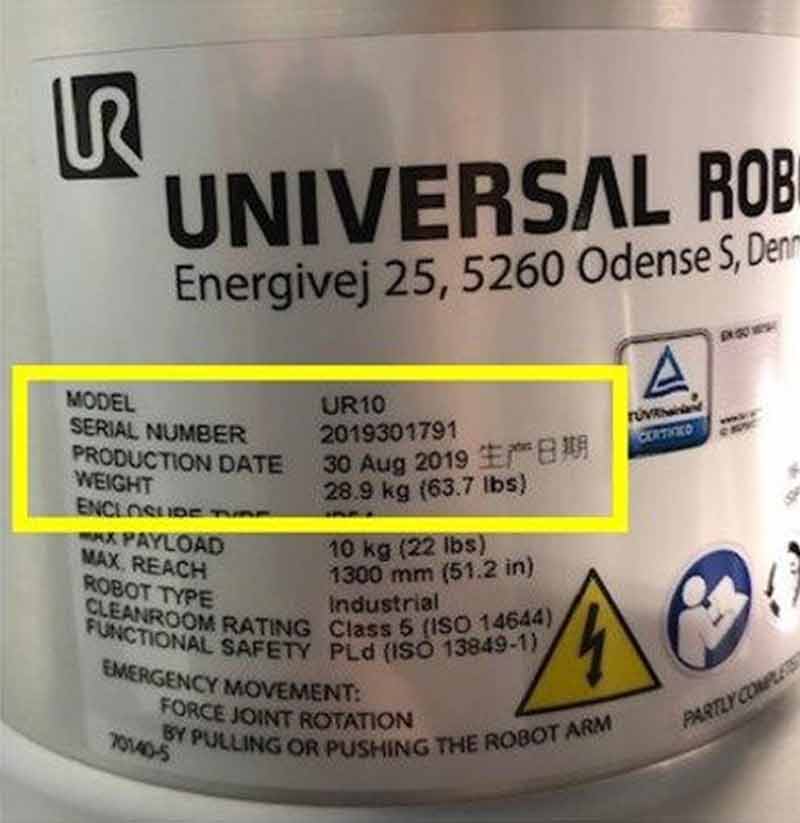
Etichetta sul braccio del robot

Etichetta sul controller

Etichetta su CFcard (per CB2/CB3.0) o USB (per CB3.1/e-series) all’interno del controller
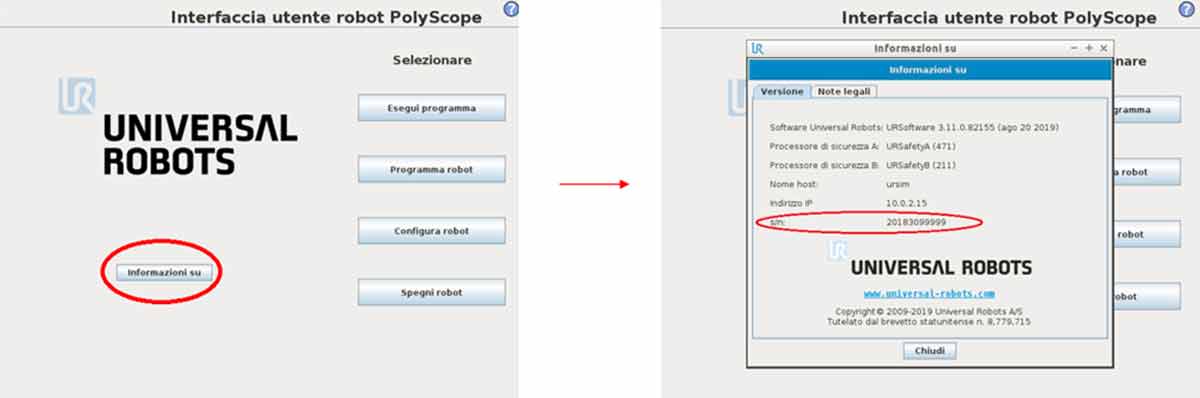
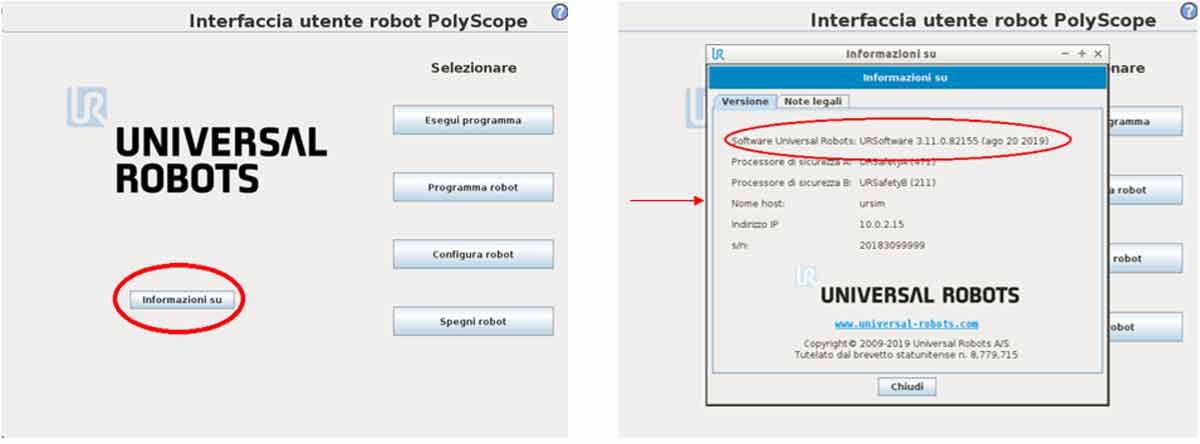
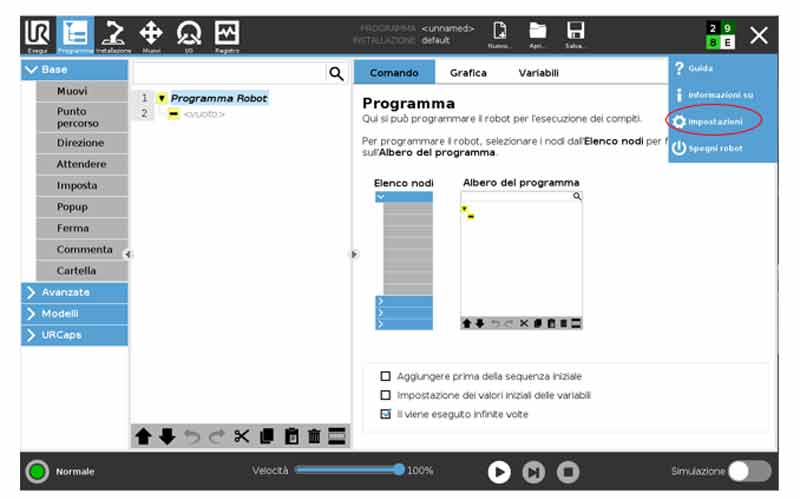
Su Polyscope, su CB, cliccando su “Informazioni su”
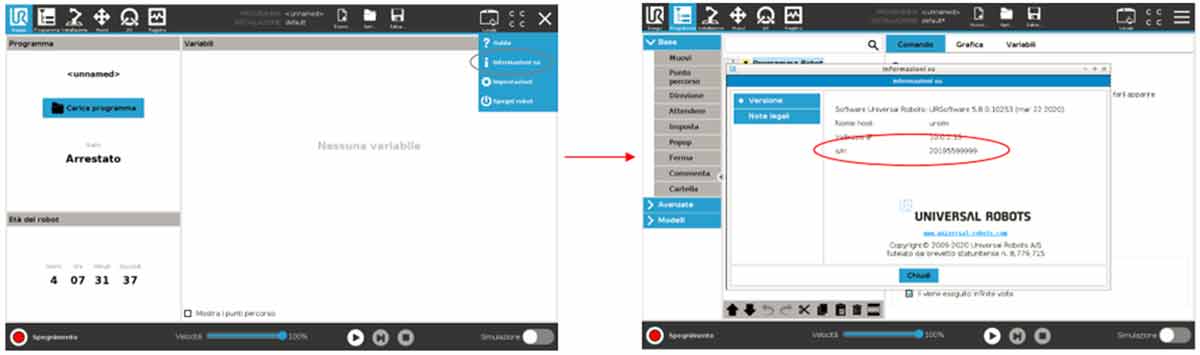
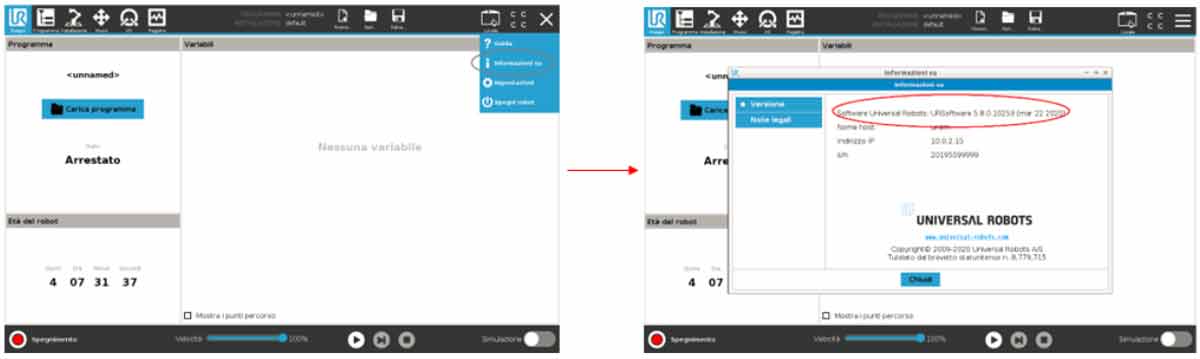
Su Polyscope, su e-series, cliccando su “Informazioni su”
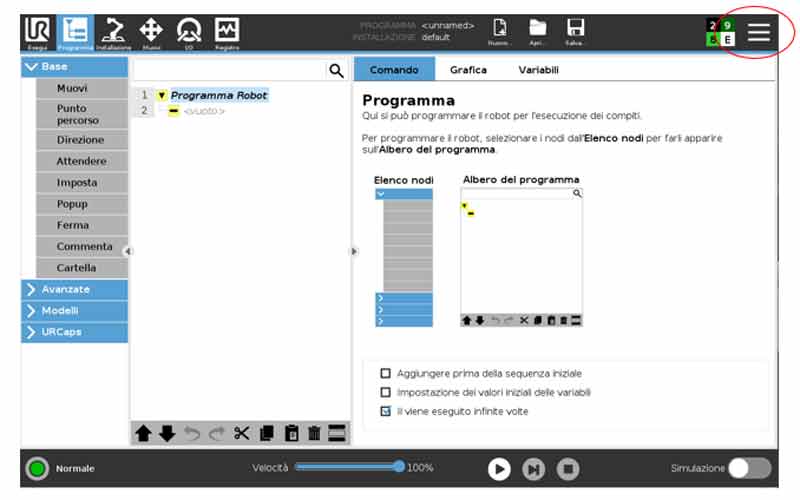
È sufficiente cliccare su informazioni su nelle seguenti schermate (clicca l’immagine per ingrandirla)
Per e-series:
Per CB3:
Step 1 – Verificare la versione software di Polyscope (vedere anche Come verificare la versione software del vostro robot?)
Step 2 – Scaricare il log file
Se la versione software è 5.8 o versioni successive:
- inserire una chiavetta USB vuota (formattata FAT32) nel teach pendant o nel controller
- spostarsi sulla finestra Registro e cliccare su File Supporto
- salvare il file
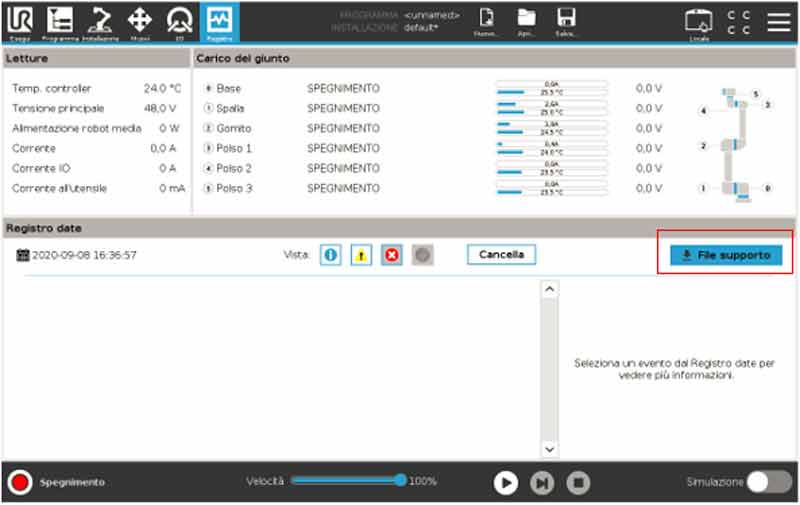
Clicca per ingrandire
Se la versione software è inferiore alla 5.8:
- scaricare il file urmagic_log_file.sh da questo indirizzo https://www.universal-robots.com/download/software-e-series/support/magic-files/magic-file-backup-log-history-file/
- copiarlo su una chiavetta USB vuota, formattata FAT32
- inserire la chiavetta in una presa USB del robot
- dopo pochi secondi compare la scritta rossa “! USB !” per segnalare che il robot sta esportando il log. Se la chiavetta è dotata di led, questo inizia a lampeggiare per segnalare la scrittura in corso
- dopo un certo tempo dipendente dalla dimensione del file da esportare comparirà la scritta “<- USB” (potrà volerci anche molto tempo)
- allo spegnersi della scritta “<- USB” si può rimuovere la chiavetta
- sulla chiavetta è ora presente una cartella nominata con il numero di matricola del robot
Step 1 – Verificare la versione software di Polyscope (vedere anche Come verificare la versione software del vostro robot?)
Step 2 – Scaricare il log file
Se la versione software è 3.13 o versioni successive:
- inserire una chiavetta USB vuota (formattata FAT32) nel teach pendant o nel controller
- spostarsi sulla finestra Registro e cliccare su File Supporto
- salvare il file sulla chiavetta
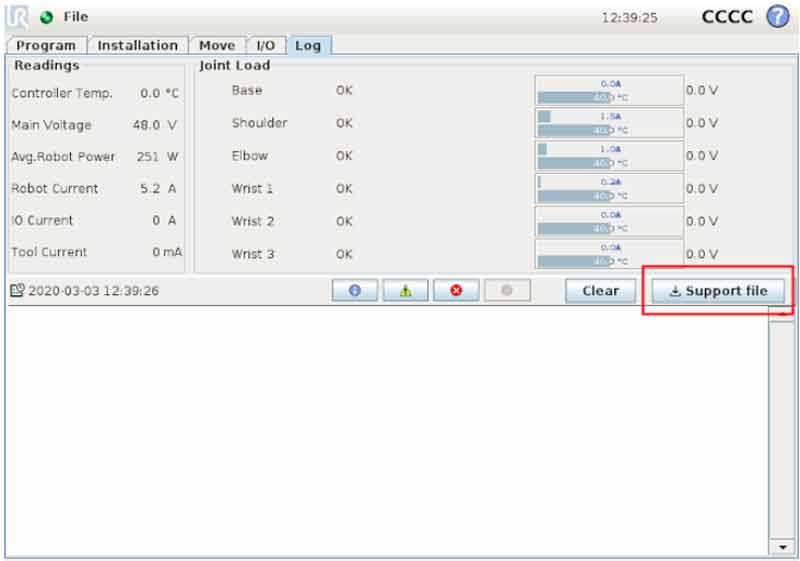
Clicca per ingrandire
Se la versione software è inferiore alla 3.13:
- scaricare il file urmagic_log_file.sh da questo indirizzo https://www.universal-robots.com/download/software-e-series/support/magic-files/magic-file-backup-log-history-file/
- copiarlo su una chiavetta USB vuota, formattata FAT32
- inserire la chiavetta in una presa USB del robot
- dopo pochi secondi compare la scritta rossa “! USB !” per segnalare che il robot sta esportando il log. Se la chiavetta è dotata di led, questo inizia a lampeggiare per segnalare la scrittura in corso
- dopo un certo tempo dipendente dalla dimensione del file da esportare comparirà la scritta “<- USB” (potrà volerci anche molto tempo)
- allo spegnersi della scritta “<- USB” si può rimuovere la chiavetta
- sulla chiavetta è ora presente una cartella nominata con il numero di matricola del robot
Step 1 – Verificare la versione software di Polyscope (vedere anche Come verificare la versione software del vostro robot?)
Step 2 – Eseguire il backup dei programmi
Se la versione software è pari o superiore alla 3.13 per CB3 o alla 5.8 per e-series è sufficiente seguire quanto riportato nella FAQ “Come estrarre i log del robot su UR CB3?” oppure “Come estrarre i log del robot su UR e-series?” in quanto la procedura consentirà di scaricare i log, backup e file di configurazione.
Per versioni precedenti seguire i seguenti step:
- scaricare il file urmagic_backup_programs.sh da questo indirizzo https://www.universal-robots.com/download/software-e-series/support/magic-files/magic-file-backup-all-programs/
- copiarlo su una chiavetta USB vuota, formattata FAT32
- inserire la chiavetta in una presa USB del robot
- dopo pochi secondi compare la scritta rossa “! USB !” per segnalare che il robot sta esportando il log. Se la chiavetta è dotata di led, questo inizia a lampeggiare per segnalare la scrittura in corso
- dopo un certo tempo dipendente dalla dimensione del file da esportare comparirà la scritta “<- USB” (potrà volerci anche molto tempo)
- allo spegnersi della scritta “<- USB” si può rimuovere la chiavetta
- sulla chiavetta è ora presente una cartella nominata con il numero di matricola del robot
Step 1 – Verificare la versione software di Polyscope (vedere anche Come verificare la versione software del vostro robot?)
Step 2 – Eseguire il backup dei file di configurazione
Se la versione software è pari o superiore alla 3.13 per CB3 o alla 5.8 per e-series è sufficiente seguire quanto riportato nella FAQ “Come estrarre i log del robot su UR CB3?” oppure “Come estrarre i log del robot su UR e-series?” in quanto la procedura consentirà di scaricare i log, backup e file di configurazione.
Per versioni precedenti seguire i seguenti step:
- scaricare il file urmagic_configuration_files.sh da questo indirizzo https://www.universal-robots.com/download/software-e-series/support/magic-files/magic-file-backup-configurations-files/
- copiarlo su una chiavetta USB vuota, formattata FAT32
- inserire la chiavetta in una presa USB del robot
- dopo pochi secondi compare la scritta rossa “! USB !” per segnalare che il robot sta esportando il log. Se la chiavetta è dotata di led, questo inizia a lampeggiare per segnalare la scrittura in corso
- dopo un certo tempo dipendente dalla dimensione del file da esportare comparirà la scritta “<- USB” (potrà volerci anche molto tempo)
- allo spegnersi della scritta “<- USB” si può rimuovere la chiavetta
- sulla chiavetta è ora presente una cartella nominata con il numero di matricola del robot
Vi preghiamo di operare secondo i seguenti passi generali, che verranno dettagliati nel seguito:
- Eseguire il backup del robot in vostro possesso (programmi e file di configurazione) nelle condizioni attuali (vedi altre FAQ)
- Verificare la versione software di Polyscope (vedi Come verificare la versione software del vostro robot?)
- Scaricare gli aggiornamenti nel paragrafo “ROBOT SOFTWARE UPDATE LEGACY (AGGIORNAMENTO POLYSCOPE)” del link: https://www.universal-robots.com/articles/ur/documentation/legacy-download-center/
IMPORTANTE: dopo ogni aggiornamento accendere sempre il braccio per avviare anche l’aggiornamento dei giunti
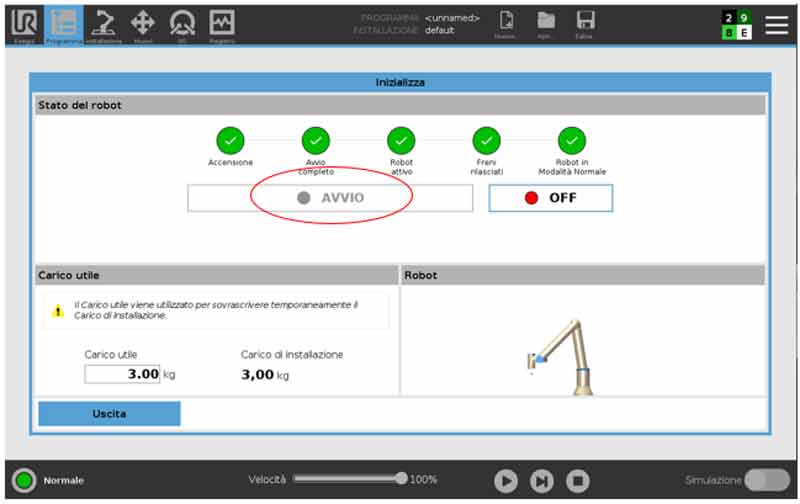
Clicca per ingrandire

Clicca per ingrandire
- Se la versione software è una delle sezioni gialle, è necessario installarla in modo incrementale fino a 5.5 (es. 5.1->5.2->5.3->5.4->5.5)
- Se la versione del software è una delle sezioni blu, è possibile eseguire l’aggiornamento direttamente a qualsiasi versione verde
- Se la versione del software è una delle sezioni verdi, è possibile eseguire l’aggiornamento diretto a qualsiasi versione verde
4) Installare gli aggiornamenti:
Clicca per ingrandire
Clicca per ingrandire
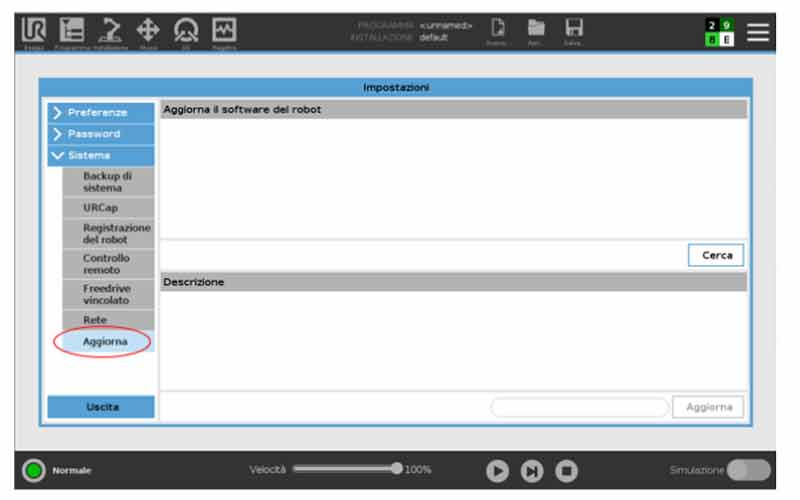
Clicca per ingrandire
Comparirà l’elenco dei file trovati, scegliere la versione da installare e premere “Aggiorna”
Vi preghiamo di operare secondo i seguenti passi generali, che verranno dettagliati nel seguito:
- Eseguire il backup del robot in vostro possesso (programmi e file di configurazione) nelle condizioni attuali (vedi altre FAQ)
- Verificare la versione software di Polyscope (vedi Come verificare la versione software del vostro robot?)
- Scaricare gli aggiornamenti nel paragrafo “ROBOT SOFTWARE UPDATE LEGACY (AGGIORNAMENTO POLYSCOPE)” del link: https://www.universal-robots.com/articles/ur/documentation/legacy-download-center/
IMPORTANTE: dopo ogni aggiornamento accendere sempre il braccio per avviare anche l’aggiornamento dei giunti
Clicca per ingrandire
Clicca per ingrandire
- è necessario installare in modo incrementale (es. 3.3->3.4->3.5->3.6->…..->3.14)
- ad ogni installazione accendere il braccio
4) Installare gli aggiornamenti:
Copiare i file di aggiornamento su una chiavetta USB formattata FAT32 e inserirla nella presa sul retro del pannello. Premere il pulsante “Configura robot”, “Aggiorna”, “Cerca…”

Clicca per ingrandire
Comparirà l’elenco dei file trovati, scegliere la versione da installare e premere “Aggiorna”
Per poter utilizzare il simulatore su un sistema Windows è necessario un emulatore Linux che permetterà di avviare Polyscope.
Questi sono i passi da seguire:
- Scaricare e installare VirtualBox per il vostro pc Windows: https://www.virtualbox.org/wiki/Downloads
- Dal sito UR scaricare il simulatore, scegliendo il sistema operativo non linux (se usate Windows) e la versione corretta del software in base alla versione Polyscope del vostro robot: https://www.universal-robots.com/download/?filters[]=98759&query=
- Estrarre il contenuto della cartella del punto 2: al suo interno troverete l’immagine ISO di una distribuzione linux con integrato Polyscope (file con estensione .vbox)
- In VirtualBox cliccare su Aggiungi per importare il file .vbox
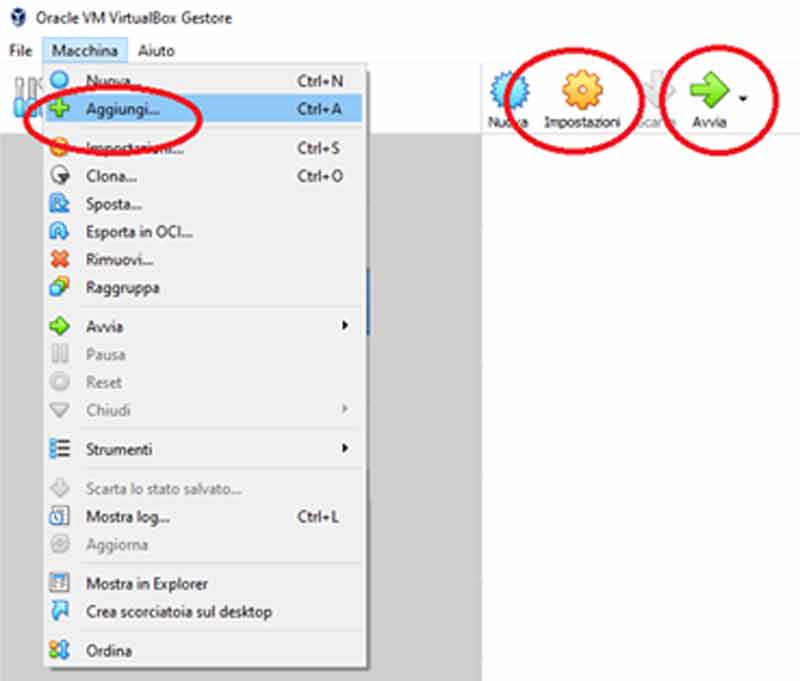
Clicca per ingrandire
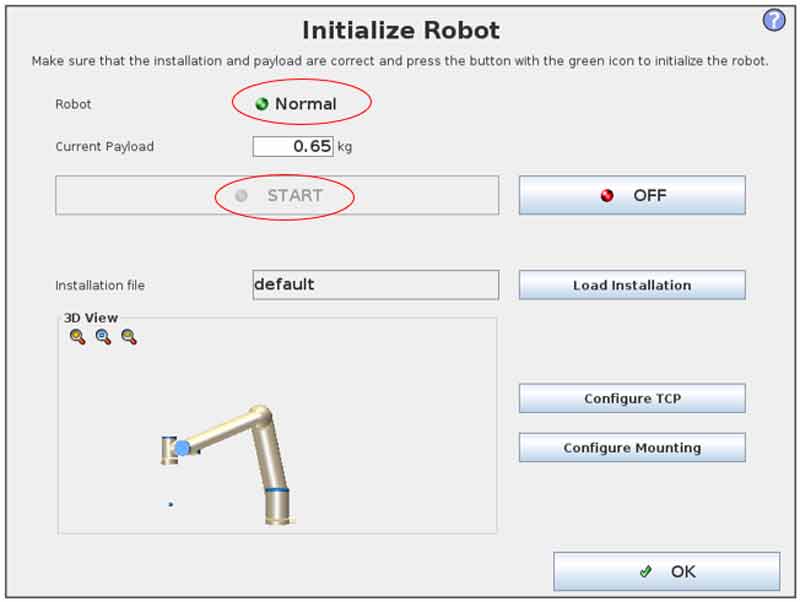
5) Cliccare su Avvia per avviare Polyscope emulato per UR3, UR5, UR10.
Per migliorare la qualità grafica del simulatore consigliamo di:
– andare in Impostazioni/Sistema e impostare la memoria video almeno a 2000MB
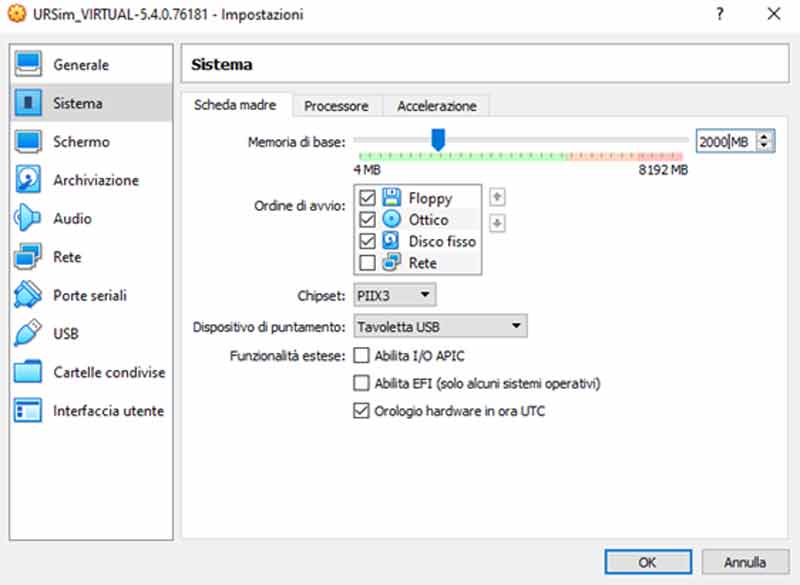
Clicca per ingrandire
– in Impostazioni/Schermo impostare 64 MB in Memoria video e mettere la spunta su Abilita accelerazione 3D
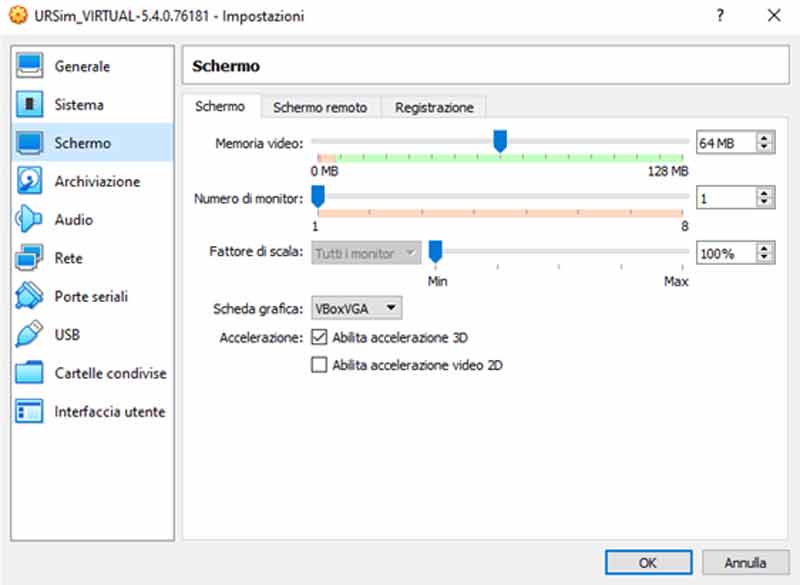
Clicca per ingrandire
Per aprire un programma creato precedentemente sul robot tramite emulatore occorre:
- inserire una pendrive nel teach pendant del robot e salvare al suo interno il programma
- inserire la pendrive nella porta USB del pc
- su VirtualBox cliccare su Impostazioni/USB
- cliccare sul simbolo della pendrive con + e selezionare la pendrive dall’elenco
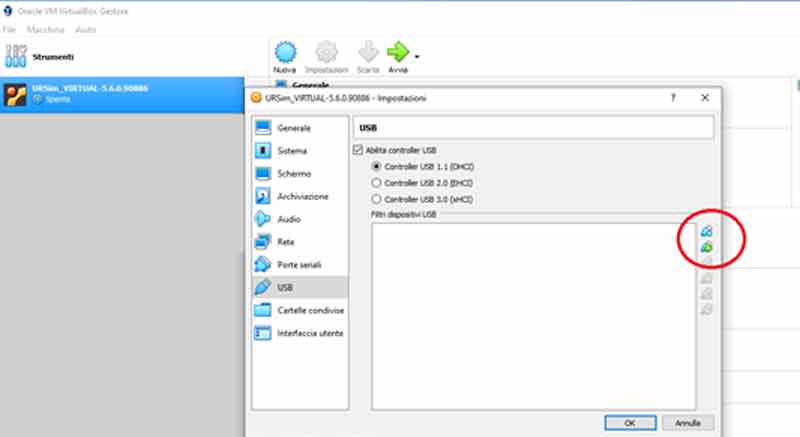
Clicca per ingrandire
Primo check: Sequenza di rebooting e foto led
1) spegnere il robot
2) staccare l’alimentazione
3) tenere premuto il pulsante di accensione per almeno 5 secondi con l’alimentazione staccata (il pulsante di accensione lampeggia e si spegne di nuovo)
4) aspettare 10 secondi
5) ricollegare il cavo di alimentazione
6) accendere il robot
Secondo check: se la luce verde del pulsante si accende e poi si spegne
– staccare l’alimentazione della scheda madre (connettore in alto in figura)
– premere il pulsante di accensione
Se il pulsante resta acceso, contattare supporto@alumotion.eu per sostituire motherboard.
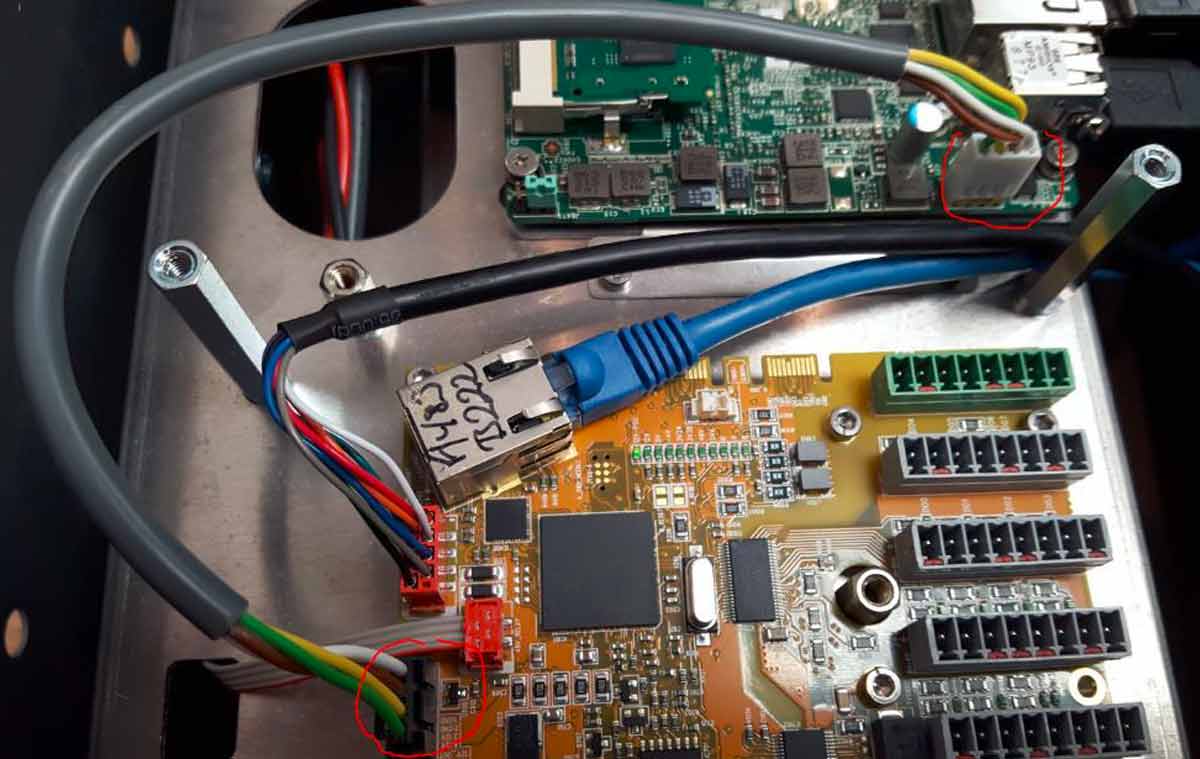
Clicca per ingrandire
TICKET / Invia una richiesta di assistenza
Questa form ci permette di chiedervi i dati necessari per darvi un supporto efficace evitando l’invio di richieste successive per avere ulteriori informazioni necessarie alla risoluzione del vostro problema.





