
Per poter utilizzare il simulatore su un sistema Windows è necessario un emulatore Linux che permetterà di avviare Polyscope.
Questi sono i passi da seguire:
- Scaricare e installare VirtualBox per il vostro pc Windows: https://www.virtualbox.org/wiki/Downloads
- Dal sito UR scaricare il simulatore, scegliendo il sistema operativo non linux (se usate Windows) e la versione corretta del software in base alla versione Polyscope del vostro robot: https://www.universal-robots.com/download/?filters[]=98759&query=
- Estrarre il contenuto della cartella del punto 2: al suo interno troverete l’immagine ISO di una distribuzione linux con integrato Polyscope (file con estensione .vbox)
- In VirtualBox cliccare su Aggiungi per importare il file .vbox
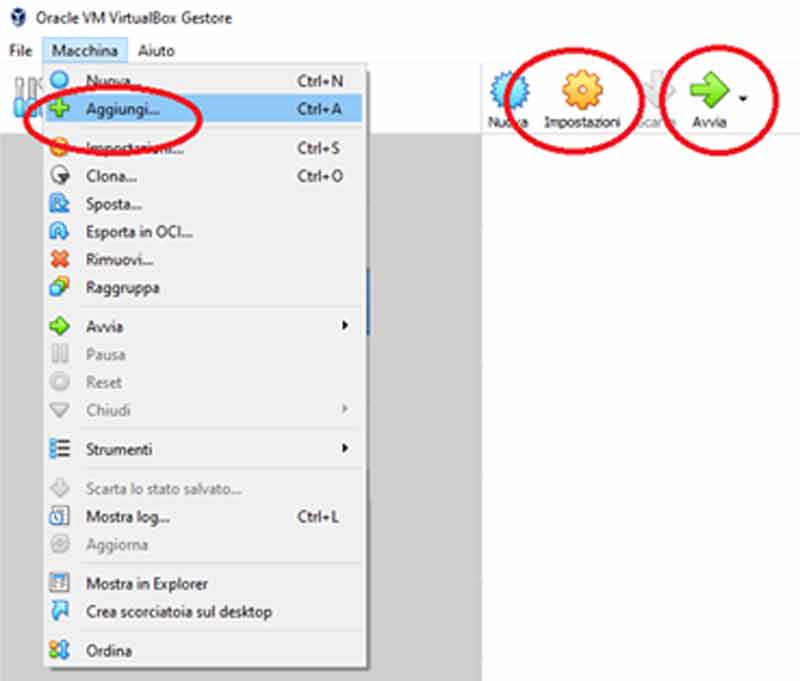
Clicca per ingrandire
5) Cliccare su Avvia per avviare Polyscope emulato per UR3, UR5, UR10.
Per migliorare la qualità grafica del simulatore consigliamo di:
– andare in Impostazioni/Sistema e impostare la memoria video almeno a 2000MB
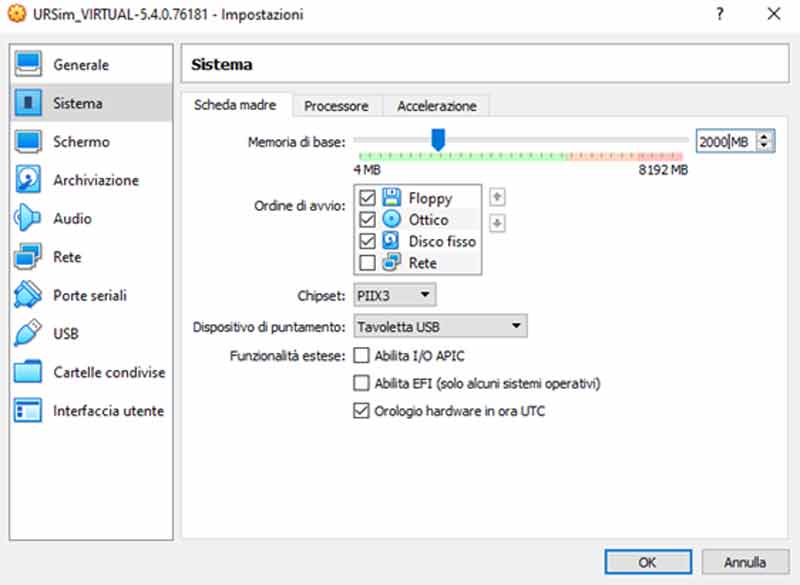
Clicca per ingrandire
– in Impostazioni/Schermo impostare 64 MB in Memoria video e mettere la spunta su Abilita accelerazione 3D
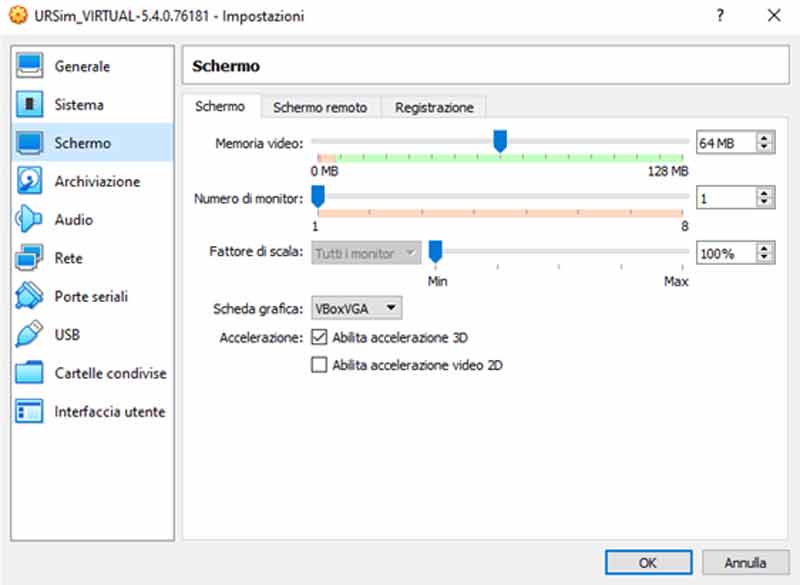
Clicca per ingrandire
Per aprire un programma creato precedentemente sul robot tramite emulatore occorre:
- inserire una pendrive nel teach pendant del robot e salvare al suo interno il programma
- inserire la pendrive nella porta USB del pc
- su VirtualBox cliccare su Impostazioni/USB
- cliccare sul simbolo della pendrive con + e selezionare la pendrive dall’elenco
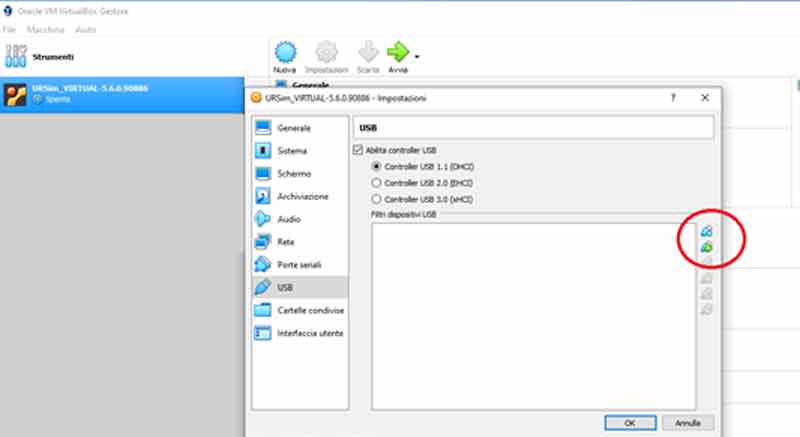
Clicca per ingrandire





