

Versione 2.3 per il software del sistema di visione 3D Pick-it: gestione di parti piatte, prese multiple e importazione CAD tra le novità
Il nostro partner Pick-it continua l’attività di sviluppo di software per rendere via via sempre più semplice e funzionale l’impiego dei robot nelle attività di produzione industriale.
Lo specialista per i sistemi di visione robotica 3D ha rilasciato, oltre a una versione 2.0 del plugin URcap che rende ancora più semplice l’integrazione con i bracci Universal Robots, una nuova versione 2.3 del proprio software.
Grazie a questa innovazione, oggi il motore di rilevamento di Pick-it, Teach, è in grado di riconoscere e gestire anche le parti piatte, che proprio per via di questa particolare forma potevano rappresentare un’insidia per i sistemi di visione a 3 dimensioni.
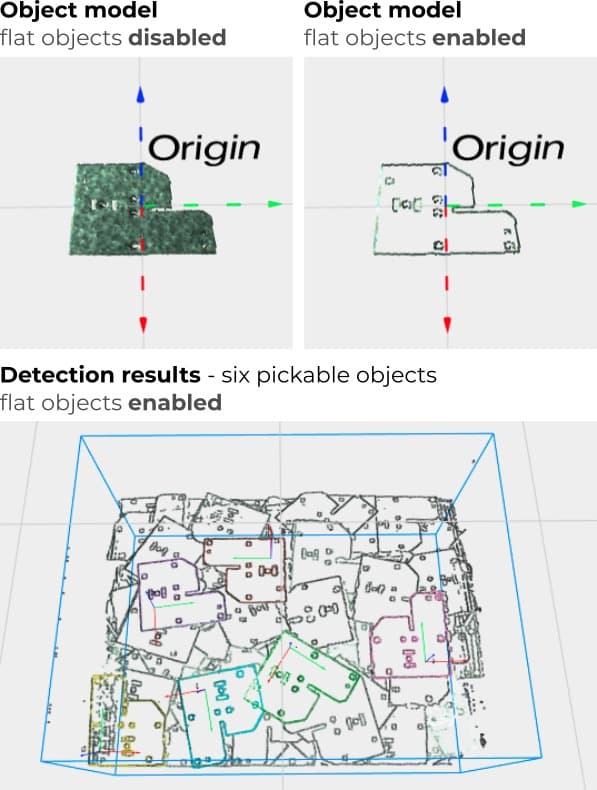
Un sistema di visione 3D, infatti, si basa tipicamente sull’individuazione di larghezza, lunghezza e anche profondità degli oggetti su cui interviene, ma quando quest’ultima viene meno (appunto a causa della forma piatta della parte) gli unici riferimenti restano larghezza e lunghezza.
La versione 2.3 del software Pick-it affina la capacità del sistema di visione di riconoscere anche le parti piatte, e di individuare quelle che si trovano in superficie anche in un cesto dove ce ne sono tante messe alla rinfusa: in questo modo la presa si conferma efficiente, come già è per gli oggetti con tutte e 3 le dimensioni, e non avviene in maniera casuale, ottimizzando i tempi e la gestione di parti anche delicate, fragili o che richiedono cautele particolari.
Un’altra importante miglioria introdotta da questo aggiornamento è la possibilità, per l’operatore, di importare il file CAD con gli estremi della forma dei tool che vengono impiegati a bordo del robot: in questo modo è possibile velocizzare l’integrazione senza la necessità di scrivere righe di codice o definire manualmente un gran numero di parametri.
Nei casi in cui il file CAD del tool non sia disponibile, l’aggiornamento del software mette comunque a disposizione alcuni modelli standard da cui partire.
La terza innovazione estende ulteriormente le capacità di presa delle pinze robotiche, dal momento che permette di creare una molteplicità di modelli di presa per gli stessi oggetti.
In questo modo, la pinza diventa in grado di gestire una forma, definita come standard, in più modi differenti, velocizzando ulteriormente l’attività di pick&place guidata dal sistema di visione 3D di Pick-it.
Pensiamo ad esempio alla presa di un flacone con la parte alta cava, che può essere fatta in più modi diversi: portando la pinza all’interno del cavo e aprendola per fare presa sui bordi, oppure facendo andare la pinza vicino al bordo e programmando la chiusura ai due lati dello stesso.

L’aggiornamento del software può essere fatto da chi ha già acquistato una delle versioni precedenti seguendo le indicazioni contenute nella guida dedicata disponibile sul sito Pick-it.
Per maggiori informazioni sul sistema di visione 3D Pick-it, i suoi ambiti di impiego e le possibili applicazioni da sviluppare, i nostri commerciali restano a disposizione attraverso i riferimenti indicati nella pagina contatti del sito.





