

Nuova Release Universal Robots: ecco le novità
Universal Robots ha rilasciato una nuova release ormai da qualche mese, precisamente la 3.2, per la gamma dei suoi robot collaborativi UR3, UR5 e UR10 della serie CB3.
Le novità introdotte sono davvero tante, in questo articolo ci concentreremo su quelle più importanti e degne di nota. In attesa della nuova release prevista per il prossimo autunno: la 3.3
Aumentata la sensibilità al setup di forza
Ne abbiamo parlato più volte all’interno del nostro blog: il controllo di forza è una delle “killer features” di Universal Robots, ovvero, una di quelle caratteristiche che hanno fatto la differenza e il successo dei robot danesi.
Ecco perchè ogni release di software integra miglioramenti in questo senso.
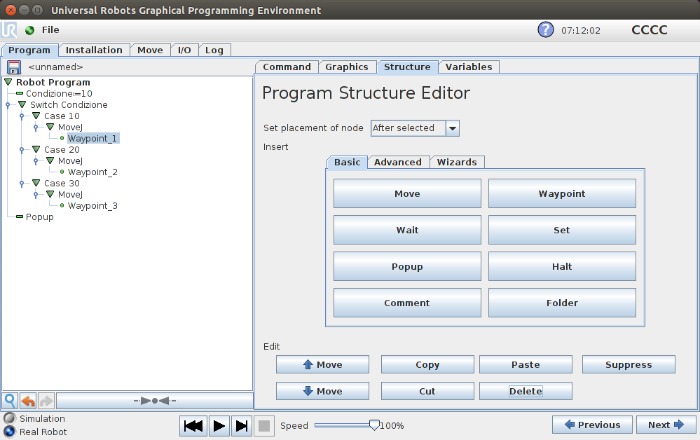
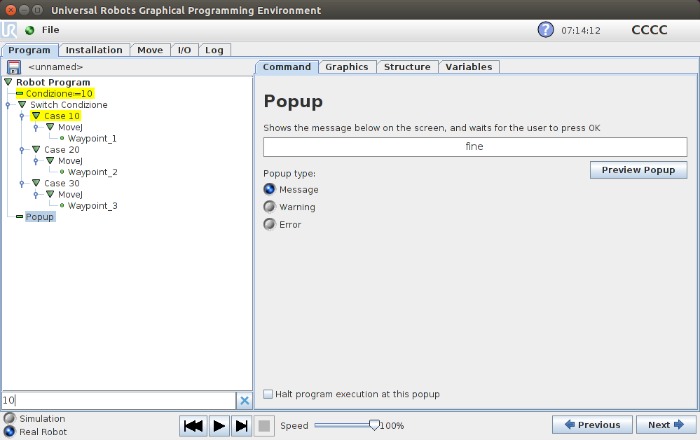
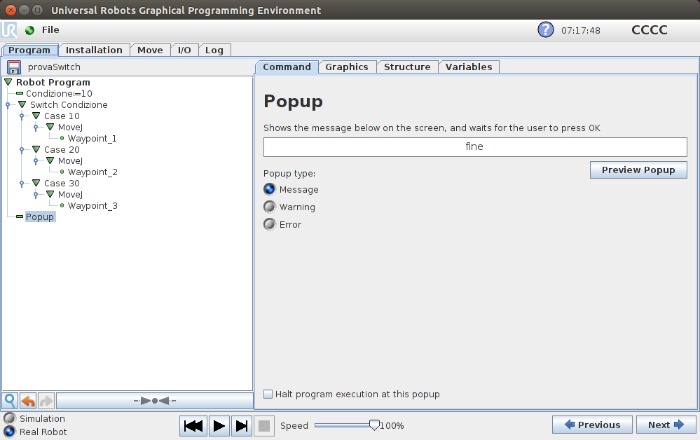
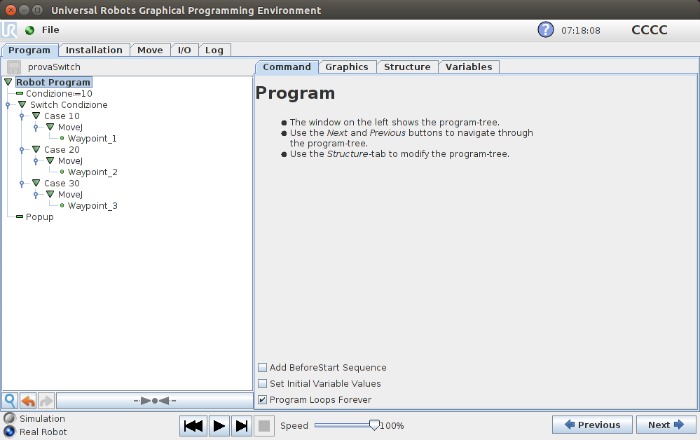
Introdotta la “costrutto switch case” in programmazione
Un’altra novità particolarmente utile? La costrutto switch case.
In programmazione lo switch, chiamato a volte anche switch-case, è una struttura di controllo che permette la verifica del valore di una espressione.
Si tratta di un’istruzione usata in gran parte dei linguaggi di programmazione, il cui ruolo consiste nel distinguere più casi corrispondenti ad altrettanti valori di una espressione. Risulta utile quando si devono controllare tanti valori per una singola variabile, contesto dove spesso è molto efficiente, anche se questa affermazione dipende molto dal linguaggio, e quindi anche dalla implementazione usata.
La nuova revisione software ti permette di usare una modalità di scrittura molto più pulita ed ordinata, sostituendo in questo modo la “cascata” di if -else-elseif, come avveniva in precedenza. Lo screenshot qui sotto offre un’anteprima di questa novità interessante.
Introdotto il pulsante “UNDO”
Si possono impostare più TCP e fare autoapprendimento della geometria del TCP.
Funzione di ricerca nel listato del programma
Con il passar del tempo si richiede ai cobot di svolgere attività sempre più complesse. La conseguenza è che i listati crescono in dimensione rendendo necessaria una funzione di ricerca testuale all’interno del programma.
Il nostro consiglio è quello di sfruttare la funzione “commento” utilizzando appropriati tag.
Implementazione protocollo di comunicazione Ethernet IP
I nostri robot sono sempre più integrati con le informazioni di fabbrica ed interconnessi con macchine o gestionali via ethernet.
Accanto al protocollo Modbus TCP, da sempre usato per l’interscambio dati, con la release 3.2 è disponibile anche Ethernet IP.
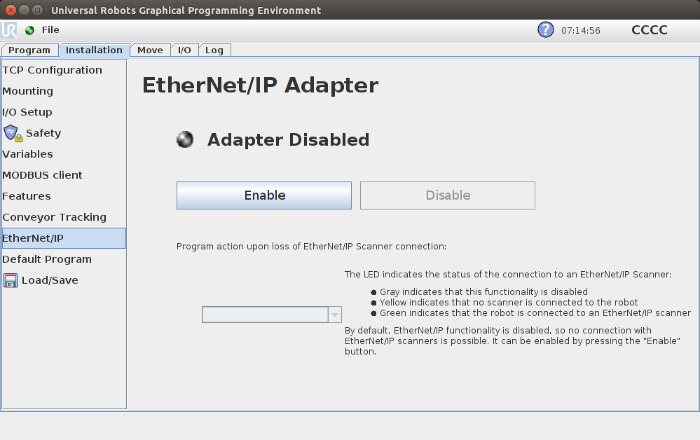
Sincronizzazione realtime con lo scanner master Ethernet IP
Sono state introdotte nuove funzioni script per sincronizzare le variabili di un programma con un PLC Ethernet IP
L’EDS file può essere scaricato qui
Ecco una carrellata di altri importanti aggiornamenti
Possibilità opzionale di implementare uno switch a 3 posizioni o pulsante uomo morto nel controller
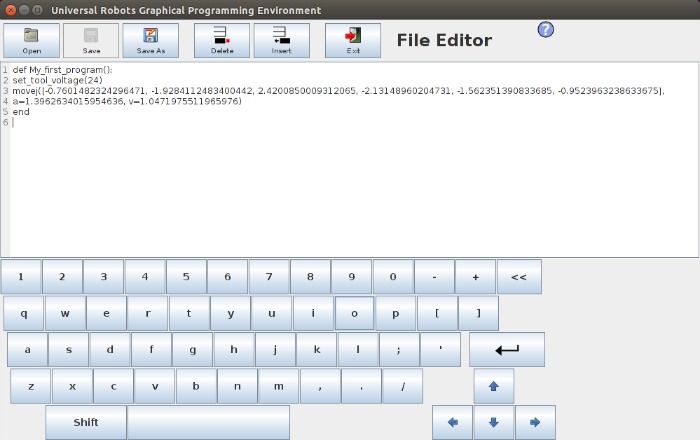
Editor di programma migliorato e reso più simile agli editor di testo convenzionali
Quando si modifica un programma in automatico compare la scritta salva con nome
Inserita numerazione righe.
Introdotte segnalazioni via interfaccia utente quando si immettono manualmente delle posizioni da raggiungere che sono prossime oppure oltre i limiti di sicurezza software impostati nella schermata safety.
Conclusioni
Come abbiamo visto questi accorgimenti sono riusciti a migliorare robot già apprezzati dal punto di vista dell’usabilità e della curva di apprendimento. Per conoscere, approfondire o anche solo ricevere maggiori informazioni non esitare a contattarci. Siamo disponibili anche per incontri e dimostrazioni presso la tua azienda. Periodicamente, organizziamo seminari e workshop dedicati ai robot collaborativi.
Per ricevere informazioni, clicca pure questa pagina.





